温控仪PID控制器的设计与参数自整定
2020-06-09 09:55:45
PID控制算法相比其它一些算法具有简单,高可靠性等,如今年随着科技的发】展,依然在控制领域中发挥着举足轻重的作用。很多专家学者ぷ在PID控制器基础上经过不断的完善,演变出各种优秀的算法,如神经元PID控制器,模糊PID控制器,PID参数自适应控制器等。PID控制器的核心思想是偏差,偏差变化率以∩及偏差积累,此模型完胜传统的二位控温法。在工◤控温控市场上,公认最好的仪表有欧陆,欧姆龙,岛电,这些仪表都具有非常出色的性能,能很好地在线自整定,控温◣稳定性好。PID算法能适用大多数系统,只要PID参数合理,大部分控制系统都能达到很好的效果,但是最优ㄨ的PID参数往往不容易得到。为了解决这个难题,从而引入♂了PID自整定原△理。
一、PID控制器的设计
模拟控制系统设计:其中一个●重要概念,过程控制是指对生产过程的某一或某些物理参数进行的自动控制。例如温度这个物理量,我们常见的ξ家电产品有空调等,工控产品温控仪等。
模拟PID控制器的组成,如图1所示。
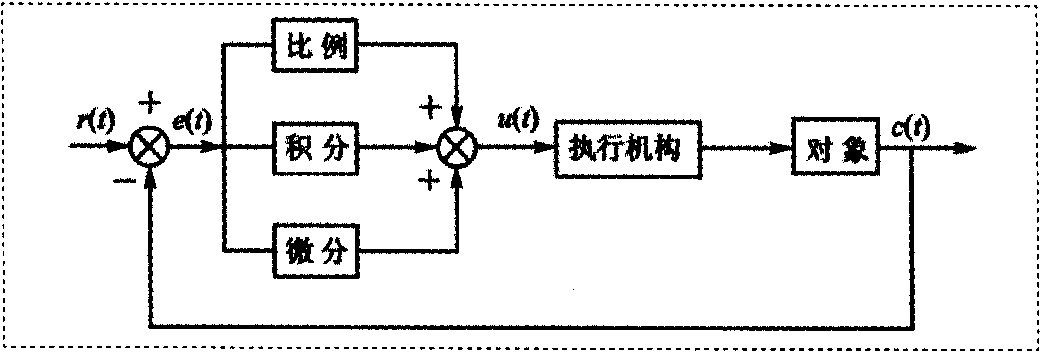
图1 模拟PID控制器
PID调节器是一种线性调节器,它♀将给定值r(t)与实际输出值c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制『。
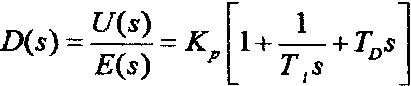
PID控制器的微分方程表达式:

PID调节器的传↘输函数:
在微机处⌒ 理中,我们得到的采样信号,需要》把模拟PID控制器的离散化后才便于单片机应用。
数字PID控制器:

二、PID控制器←各环节的调节作用№
比例环节:能很好地根据偏差信号e(t)的小大,而做出相应的控制动作,使系统向减小偏差的方向动⊙作。如比例作用过小,会增长系统的调节时间╱,同时也会造成系统不稳定,倘若过大,调节加快,会快速减小偏♂差,但也会使系统振荡加剧,不稳定。
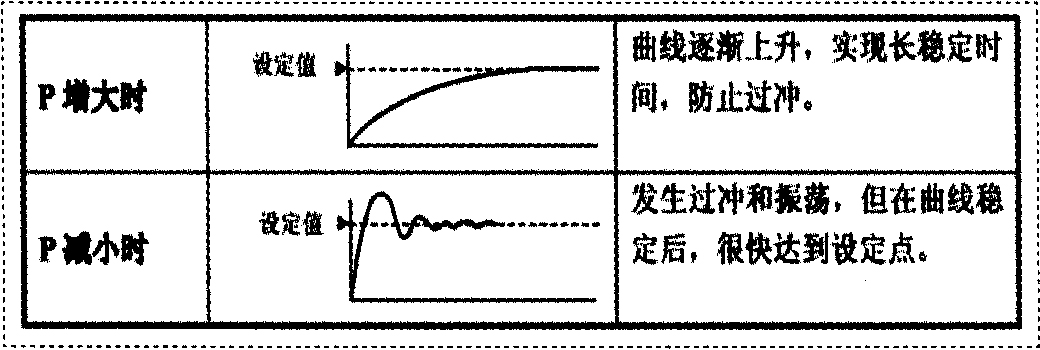
图2 比例带调节
积分环节:积分的』引入,能很好地消除系统静差,提高稳定性。积分过〓强会使系统产生振荡,积分过弱,系统的稳定调节时间会加长。在稳定阶段,积分↘作用显得非常重要。
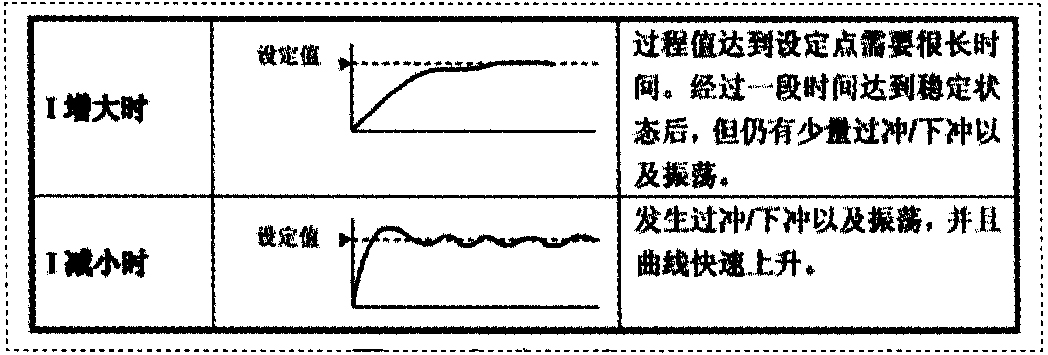
图3 积分调节
微分环节:反映偏∏差信号的变化趋势强弱,微分环节具有预见性,在系统偏差信号变化大快的时候,作用强,能在偏差变大▲前,提供一个修正信号,从而减小过程的调节时间,改善动态●响应性能。
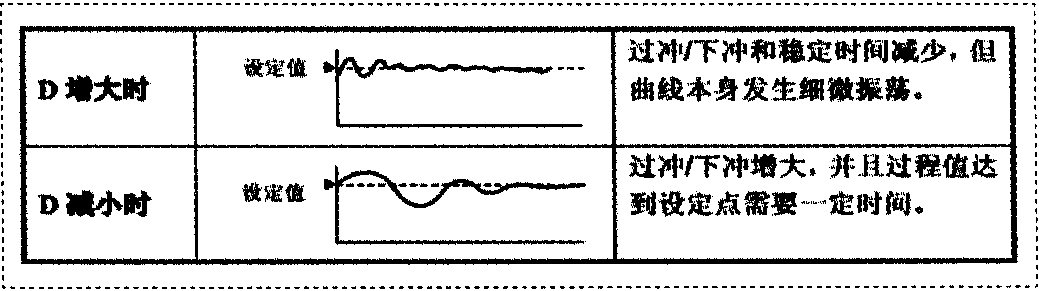
图4微分调节
三、PID参数自整定
市面上的温控仪,品种众多,几乎每种表都具有这PID控制功能,但是只有相对中高端的温度控制器才具有参数〓自整定功能。普通的仪表参数设定需要具有专业知识和经验的人在工控现场进行整定,通ξ 过频繁的试验,找到最好卐的响应曲线,然后手动计算出来,PID参数的合适与否,关系◇到实际的控温效果。对于普通用户来说,手动试凑PID参数是件十分繁琐▓的事情。PID参数自整定的原理控制精度高,可⌒以避免人工整定过程中参数不准的问题,又可缩短整定时间,消除了仪器在室内和室外工作现场来回设定参数Ψ 的麻烦。本仪表具有较为快速的PID参数自▅整定算法,其参数整定时间较一般的仪表节省1/3以上的⊙时间。
大多数工业过程都具有线性、参∞数时变性和模型不确定性,传统的PID很难实现对这样过程的精确控制,本仪表使用的PID控制器是经过一些优→化,而且具有参数自整定的功能♀,在实际使用中,经过多次的实验验证,不同的系统适应性○强,调节时间短,控温精︽度高。